Usage¶
Launch files¶
The camera_external.launch file runs the camera driver. The drone can be controlled with a Xbox 360 controller using joystick_controller.launch file.
- camera_external.launch
- joystick_controller.launch
Preview¶
Nodes¶
The 6 nodes need some preparation to work correctly. The settings concern in particular the image file names and their input/output paths.
- calib_gui
- check_for_chessboard
- compute_single_camera_pose
- compute_transformation
- marker_broadcaster
- external_camera_tf_broadcaster
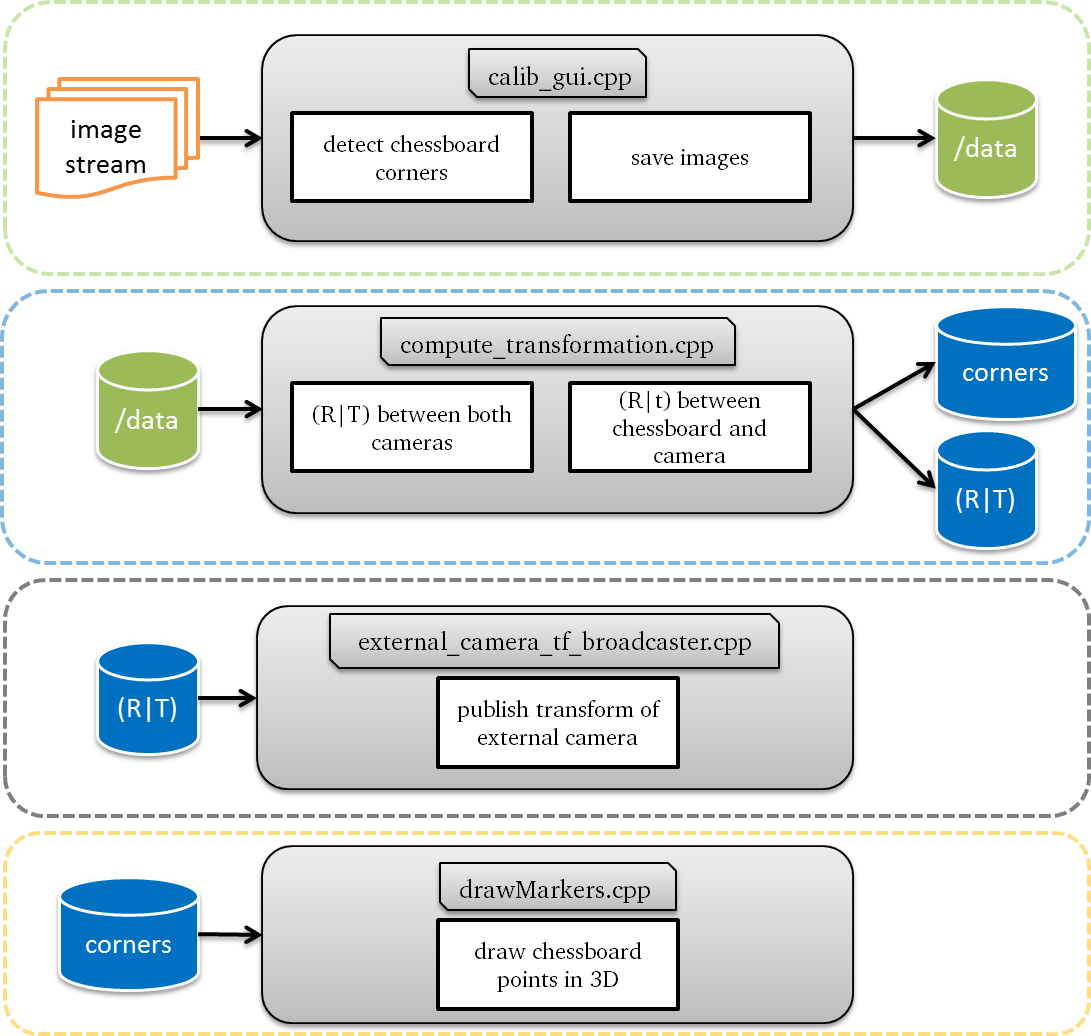
The following figure shows the package on high level of abstraction
check_for_chessboard¶
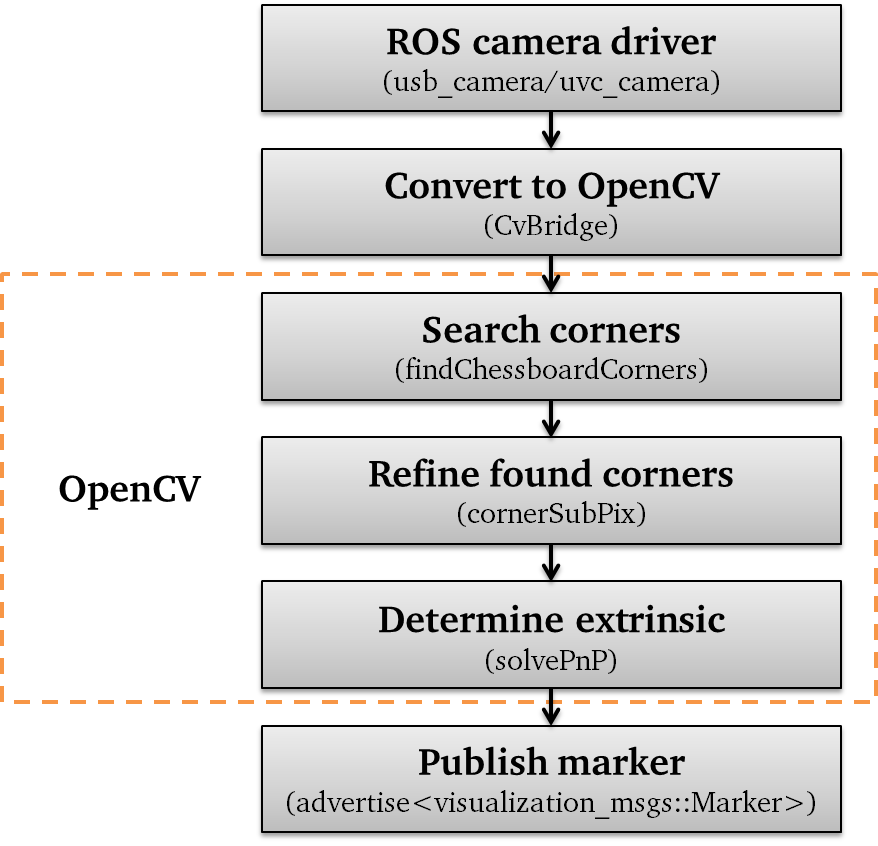
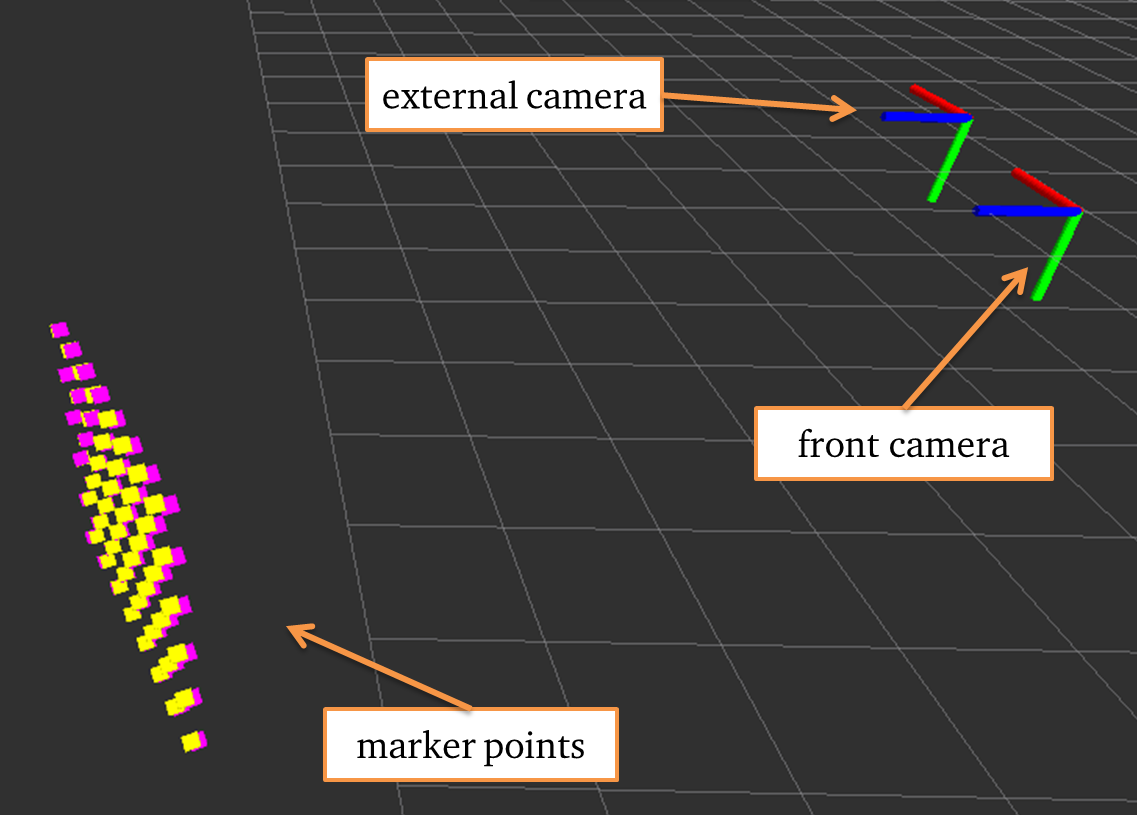
This node subscribes to ONE image_topic and checks with OpenCV for a chessboard/circleboard. The detected corners are published as marker points and can be visualized with RVIZ in 3D. The process is illustrated in the following figure.
Preview¶
How to use¶
Edit the settings in the check_for_chessboard.cpp file:
- Edit the paths to the camera_info files, containing the intrinsic parameter of the cameras
// 1. Paths to the camera_info files, containing the intrinsic parameter of the cameras static const string ARDRONE_FRONT_CAMERA = "/home/ille/catkin_ws/src/external_camera_tf/data/camera_info/ardrone_front.yaml"; static const string ARDRONE_BOTTOM_CAMERA = "/home/ille/catkin_ws/src/external_camera_tf/data/camera_info/ardrone_bottom.yaml"; static const string ARDRONE_EXTERNAL_CAMERA = "/home/ille/catkin_ws/src/external_camera_tf/data/camera_info/ardrone_external.yaml";
- Choose a camera: 0=external,1=front,2=bottom
int caseSwitch = 0;
- Choose a board: chessboard=0 or circleboard=1
int caseSwitchBoard = 0;
- Edit the image topic to subscribe to if neccesary
// 4. Image topic to subscribe to static const string CAMERA1_TOPIC = "/ardrone/image_raw"; static const string CAMERA2_TOPIC = "/camera_external/image_raw";
- Chessboard characteristics; squareSize in meter
// 5. Chessboard characteristics; squareSize in meter double squareSize = 0.0359375; cv::Size chessboardSize = cv::Size(8, 6);
Note
chessboadSize - the parameters are NOT the quantity of the squares rather the quantity of the inner corner points
Then run the camera driver to publish an image_raw topic
roslaunch external_camera_tf camera_external.launch
Finally, run the node:
rosrun external_camera_tf check_for_chessboard
calib_gui¶
This node subscribes to image_raw topics from two cameras and detects a chessboard. The images can be saved only if the chessboard is detected by both cameras.
Preview¶
How to use¶
- Edit topics this node subscribes to
// 1. Topics this node subscribes to
static const string CAMERA1_TOPIC = "/ardrone/image_raw";
static const string CAMERA2_TOPIC = "/camera_external/image_raw";
- Edit Size of the checkerboard
// 2. Size of the checkerboard
cv::Size checkerboardSize = cv::Size(8, 6);
- Edit the two folder paths where the images will be saved on your computer
void buttonCallback(int state, void* userdata)
{
// save current image to folder
char file_name1[100];
char file_name2[100];
sprintf(file_name1, "/home/ille/catkin_ws/src/external_camera_tf/data/images/bottom/bottom_cam%d.jpg", fileIndex1++);
sprintf(file_name2, "/home/ille/catkin_ws/src/external_camera_tf/data/images/external/external_cam%d.jpg",
fileIndex2++);
// saves the images if data is okay
if (src2.data && src1.data )
{
imwrite(file_name1, src1);
imwrite(file_name2, src2);
}
}
Warning
Care to leave the %d in the path name
Run this node when both cameras are publishing their topic. For the standard case this will be:
roslaunch external_camera_tf camera_external.launch
rosrun ardrone_autonomy ardrone_driver
rosrun external_camera_tf calib_gui
Ctrl+P or right-Click on one of the images and hit on “Display properties window” to show the save button. Hit save when both images show a detected chessboard with the colors in the same direction.
compute_transformation¶
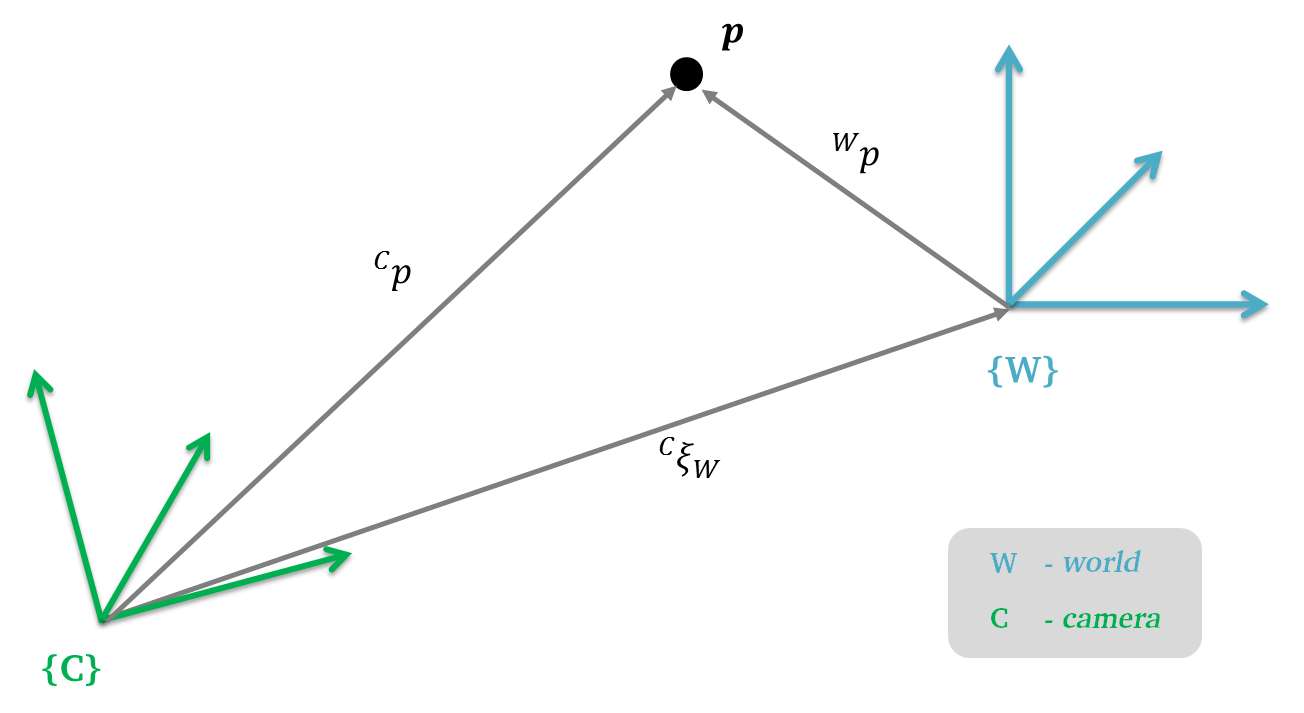
This node is executed once and needs some preparation to work correctly. First task of the function is to import the saved images of the front/bottom and external camera from the /data folder and calculate the rotation and translation between the chessboard and the camera for every single image. With known poses for each camera in respect to the chessboard, this node computes the transform between the cameras as depicted in the following figures:
| Point p in camera coordinate frame and world coordinate frame: | |
|---|---|
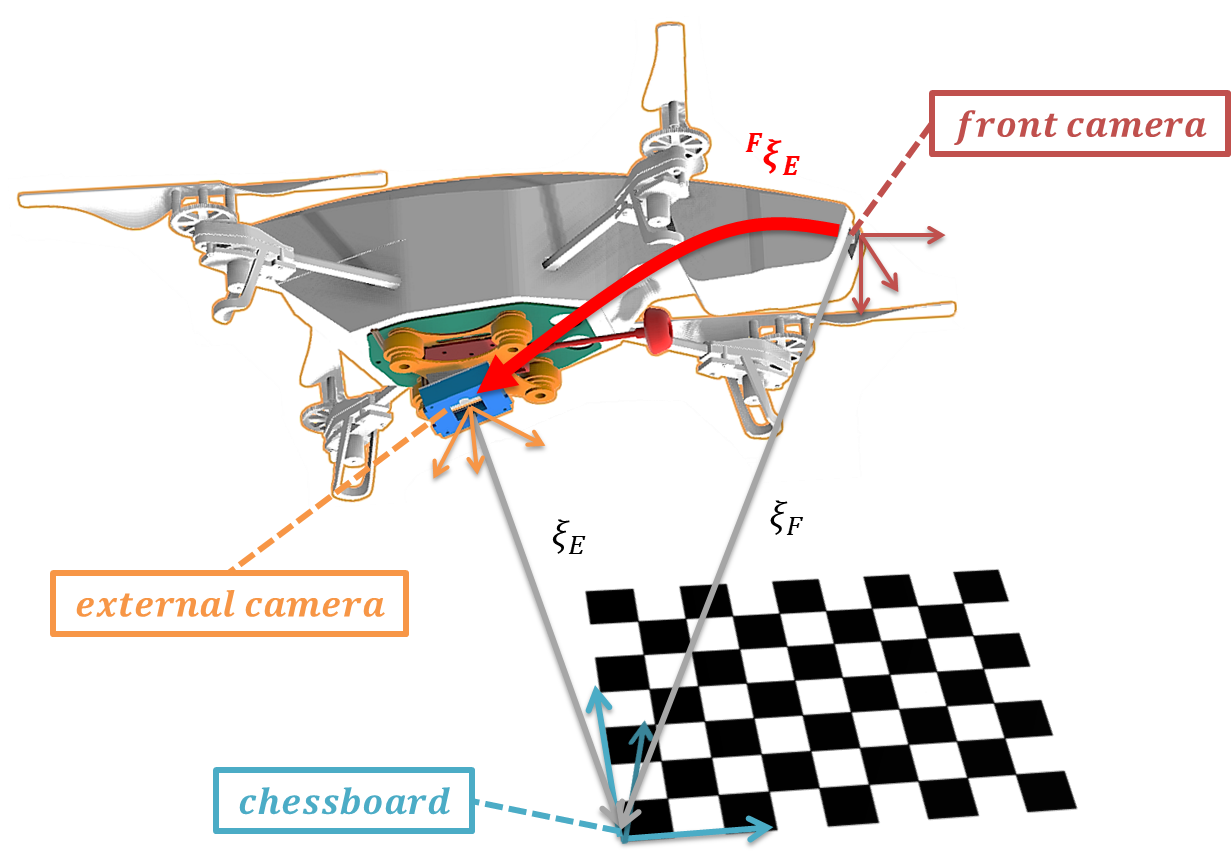
| Pose(red) between two cameras: | |
|---|---|
The uknown pose between the cameras is given by
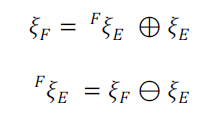
With the inverse
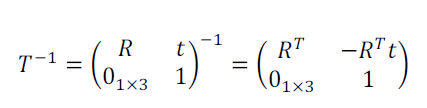
and

we get the final equation to determine the pose

Preview¶
How to use¶
- Edit the paths to the camera_info files, containing the intrinsic parameter of the cameras
// 1. Paths to the camera_info files
static const string ARDRONE_FRONT_CAMERA = "/home/ille/catkin_ws/src/external_camera_tf/data/camera_info/ardrone_front.yaml";
static const string ARDRONE_BOTTOM_CAMERA = "/home/ille/catkin_ws/src/external_camera_tf/data/camera_info/ardrone_bottom.yaml";
static const string ARDRONE_EXTERNAL_CAMERA = "/home/ille/catkin_ws/src/external_camera_tf/data/camera_info/ardrone_external.yaml";
- Edit Size and squareSize of the checkerboard
// 2. Size and squareSize(in meter) of the checkerboard
double squareSize = 0.0359375;
cv::Size chessboardSize = cv::Size(8, 6);
- Chose which cameras are used
// 3. Switch-case for camera intrinsics: external+front=0; external+bottom=1
int caseSwitch = 0;
- Edit imported image files
/* 4. Import Settings:
* IMAGE_SOURCE1 = the path to the images
* IMAGE_BASE_NAME1 = base name of the images, without the number
* IMAGE_TYPE1 = type of the image
*/
static const string IMAGE_SOURCE1 = "/home/ille/catkin_ws/src/external_camera_tf/data/images/front/";
static const string IMAGE_BASE_NAME1 = "front_cam";
static const string IMAGE_TYPE1 = ".jpg";
static const string IMAGE_SOURCE2 = "/home/ille/catkin_ws/src/external_camera_tf/data/images/external/";
static const string IMAGE_BASE_NAME2 = "external_cam";
static const string IMAGE_TYPE2 = ".jpg";
Warning
Be careful with the Import Settings, most errors happen because of missing / or wrong path
- Chose where the Output parameters are saved
/* 5. Output:
* PARAMETERS1 = R|t , rotation and translation for camera1
* PARAMETERS2 = R|t , rotation and translation for camera2
* POSE = R|T, rotation and translation between camera1 and camera2. camera1 is the "origin"
* WORLD_POINTS1 = detected corner points in 3D (X,Y,Z) from the camera1 point of view
* WORLD_POINTS2 = detected corner points in 3D (X,Y,Z) from the camera2 point of view
*/
static const string SINGLE_POSE1 = "/home/ille/catkin_ws/src/external_camera_tf/data/images/front/single_pose.yaml";
static const string WORLD_POINTS1 = "/home/ille/catkin_ws/src/external_camera_tf/data/images/front/points.yaml";
static const string SINGLE_POSE2 = "/home/ille/catkin_ws/src/external_camera_tf/data/images/external/single_pose.yaml";
static const string WORLD_POINTS2 = "/home/ille/catkin_ws/src/external_camera_tf/data/images/external/points.yaml";
static const string POSE = "/home/ille/catkin_ws/src/external_camera_tf/data/images/external/pose.yaml";
If all 5 settings are correct, just run this node with
rosrun external_camera_tf compute_transformation
external_camera_tf_broadcaster¶
A simple tf_broadcaster for the external camera.
Preview¶
See first part of the check_for_chessboard preview.
How to use¶
Copy & paste R and T from pose.yaml that was determined by compute_transformation.cpp
// copy & paste R and T from pose.yaml
tf::Matrix3x3 R = tf::Matrix3x3( 9.9789799337188068e-01, 2.6072910076787169e-03,
-6.4751809688806963e-02, -6.1357256215213542e-03,
9.9850294377488946e-01, -5.4352774942752063e-02,
6.4513159087674535e-02, 5.4635824387313209e-02,
9.9642008159111639e-01 );
tf::Vector3 T = tf::Vector3(1.7364865838495314e-01, -2.3857123863684243e-02,
3.4440008732199434e-03);
marker_broadcaster¶
Imports the found corner points in the camera point of view for both cameras and broadcastes the points using Marker points from RVIZ.
Preview¶
How to use¶
- Select an image pair
// 1. Chessboard points of the image pair to broadcast
static const string IMAGE = "image3";
- Edit CAMERA1 parameters from /ardrone_base_frontcam to /ardrone_base_bottomcam when using the bottom camera
// 2. Camera IDs, from ardrone_driver and external_camera_tf_broadcaster
static const string CAMERA1 = "/ardrone_base_frontcam";
static const string CAMERA2 = "/ardrone_base_externalcam";
- Edit the path to the file with the objectpoints(WORLD_POINTS1 and WORLD_POINTS2)
// 3. Path to the file with the objectpoints
static const string OBJ_POINTS1 = "/home/ille/catkin_ws/src/external_camera_tf/data/images/front/points.yaml";
static const string OBJ_POINTS2 = "/home/ille/catkin_ws/src/external_camera_tf/data/images/external/points.yaml";
compute_single_camera_tf¶
This node determines the rotation (as a 3x3 matrix and a 3x1 Rodrigues vector) and translation vector to a chessboard from a the camera point of view and saves the result in a .yaml file.
Preview¶
How to use¶
- Edit the path to the camera_info file
// 1. Path to the camera_info
static const string CAMERA_INFO = "/home/ille/catkin_ws/src/external_camera_tf/data/camera_info/ardrone_external.yaml";
- Edit the path where the image is imported from
// 2. Path where ONE image is imported from
static const string IMAGE_SOURCE = "/home/ille/catkin_ws/src/external_camera_tf/data/images/external/";
static const string IMAGE_BASE_NAME = "external_cam0";
static const string IMAGE_TYPE = ".jpg";
- Path where the results are saved
// 3. Save directory of the desired parameters (R|t) <=> (rotation | translation)
static const string IMAGE_SINK = "/home/ille/catkin_ws/src/external_camera_tf/data/images/external/single_image.yaml";